サービス紹介

このページがどのようなページか説明する文章を入れてください。このビジネスやサービスをはじめたきっかけや、商品の概要や他とは違うポイントなどを記入してください。閲覧者を思い浮かべながら、相手が読みやすく、内容が伝わりやすい文章を意識してください。そうすればきっとホームページの成功にもつながります。



思う
ここんとこ、日曜日の天気が悪いので悲しいです。
このマシーンのコードネームは筋斗雲です。
心の貧しい人は乗れません。
2020/09/07 アスファルトの地上絵マシーンの内部
基板ラックはアクリル板で作りました。
ダウンリンク用のXBeeとDC/DCコンバータが貼り付いています。

内部です。

軽量なリチウムイオン・バッテリをセンタに置いて、頭脳である基板をフロントへ、
水回りのバルブをリアにしました。
水の排出ホースはリアの車軸のセンタになっています。
RTKのアンテナを排出ホースの真上に設置します。
思う
ハードやソフトを知っていてもモノを作るには機構も知らなければなりません。
ネジは3山で70%の力を受け止めています。
ナットから異常に長く飛び出したネジを見たことがあります。
hinjyaも極力在庫部品で作っているのでピッタリの長さのネジが無い時にはネジカッターを使います。
便利ですよ、これ。

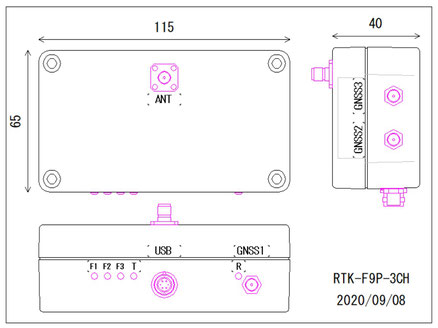
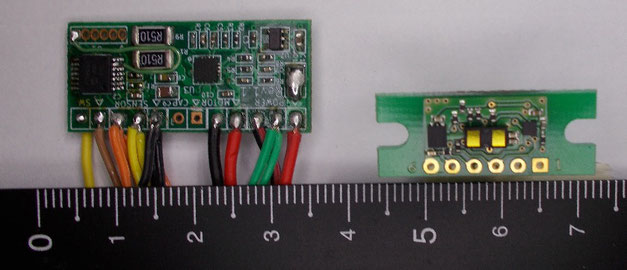
2020/09/08 RTK-F9P-3CH
自動車やドローンなど水平に移動するのなら2個の座標で良いのだけど、
やっぱ3次元の空間なので3個の座標が必要な時があります。
3個のZED-F9Pを使ったユニットです。
3ch920MHz受信機や別チャンネル送信の移動局で作った回路を一部変更しました。
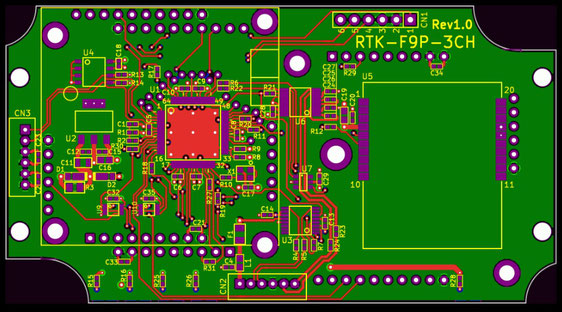
手頃なケースが無いので結局このケースになってしまいました。
思う
新アイサイトは「みちびき」対応だそうですが、何に対応しているのか探しても見つかりませんでした。
画像処理がASICからFPAGに戻ったそうです。
これからの生産台数と開発時間と費用を考えたからでしょうか。
カメラも日本製から海外製に変更されたそうです。
家電が全滅して、自動車業界にくっついて生き延びていた電気業界も
今後は更に厳しくなりそうです。
2020/09/09 RTK-Rover with OLDと920MHz 1CH 送信機
S岡大学さんのNtripを920MHzで送信して角度を測ってみました。

わざわざNtripを920MHzに変換するのは移動局毎に携帯電話が不要だからです。
RTK-Rover with OLDに角度設定スイッチを加えたので角度を計算しなくてすむようになりました。
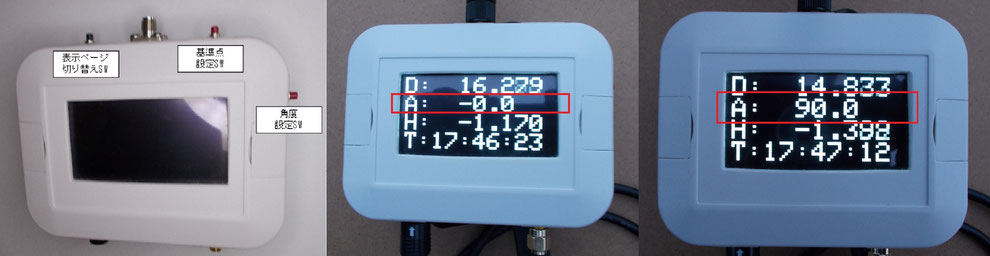
引かれた線の角度を調べる使用方法は
1)ホームベースで基準点設定スイッチを長押しする。
2)3塁で角度設定スイッチを長押しする。
3)一塁での角度の表示を見ると。。。。90度になってるじゃん。
これから引く線の場合には<追記>
1)引こうとする2つの線の交点で基準点設定スイッチを長押しする。
2)スペースを考えて片方の線を引く
3)2)の線上で基準点からなるべく距離のある場所で角度設定スイッチを長押しする。
4)表示を見ながら目的の角度の場所まで歩く。
距離が長い方が誤差が少なくなるので、10m以上の距離の場所を歩く。
座標の誤差は±2cmなので、10mでの角度の誤差は0.07度ですが、
10mより先の線を引く時に曲がらないように30m,50mなどなるべく距離を長くします。
5)4)の目的の角度の場所と1)の2つの線の交点を結ぶ直線を引く。
ソフトボール投げの30度も一発で決まります。
50mの巻き尺で測れない400mの距離でも測れます。
各学校で買ってくれたらなあ。
2020/09/10 RTK-F9P の9軸センサ
大きな箱のRTK-F9PとRTK-F9P-WiFiには9軸センサが入っています。
9軸ってのは加速度、ジャイロ、地磁気が各3軸あるので合計で9軸になります。
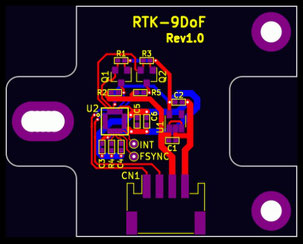
各種センサの生データ以外にもセンサ内臓のDMPが計算した姿勢を得ることができます。
RTKが1個の場合には直前の走行ラインから進行方向を推定しますが、
9軸センサがあると絶対値として進行方向が分かります。
その場で旋回する時に便利です。
この辺の安いセンサは角速度積算ベースで静止時の加速度と地磁気でジャイロのドリフトをリセットしてそうです。
細かな振動を加え続けると姿勢が変になります。
基板の固定に振動防止のスペーサが必要です。
思う
コロナの第2波が収まりつつあります。
E国のワクチンが頓挫したようです。
ワクチンが出回るまではこの繰り返しでしょう。
5輪は厳しそうです。
2020/09/11 moving base のためのファームウェアのアップデート
ZED-F9Pのmoving base は、ファームウェア1.13に最適化されています。
購入したモジュール(基板)が古いと1.13になっていません。
ファームのアップデートにはUSBシリアル変換器が必要です。
アップデートはu-centerのTools-Firmware Updateで行いますが、
コマンドによってsafe bootモードになります。
safe bootモードではUART1かIC2しか通信出来ません。USBではダメなのです。
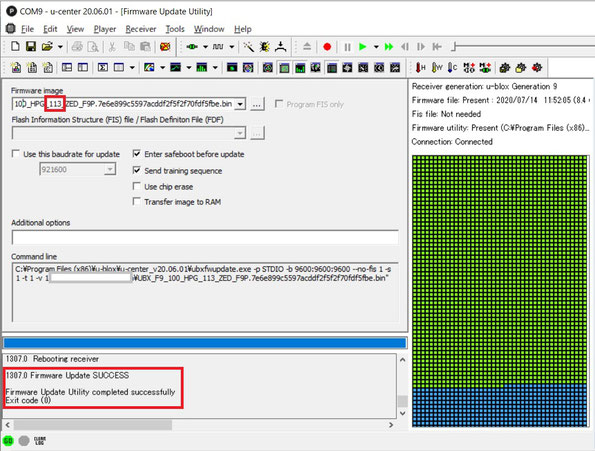
アップデート中は右側のブロックが少しづつ緑になっていきます。
safe bootで9,600bpsになってしまいますが、921,600bpsでも可能です。
9,600bpsではアップデートに20分以上待たされます。
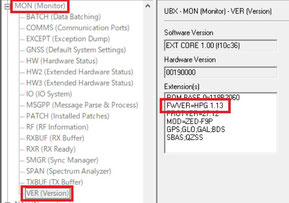
アップデート後はView-Messages ViewのUBX-MON-VERでFWVERを確認します。
アップデートするとZED-F9Pの設定が初期化されてしまうので
View-Configuration Viewで再設定します。
Save current configurationも忘れずに。
hinjyaはReceiver-Action-Save configもしています。
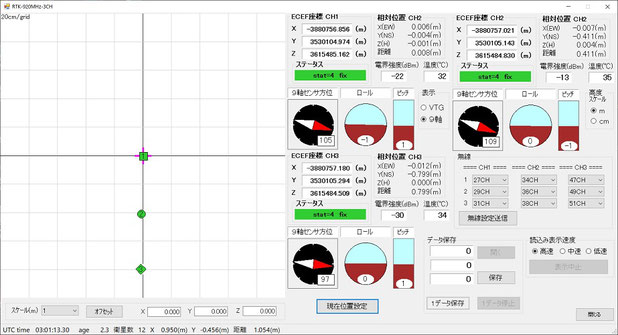
2020/09/12 RTK-F9P-3CHのケース加工
RTK-F9P-3CHのケースの材質はABS樹脂です。
樹脂ケースにも種類があって他にはポリカーボネイトってのもありますが、ABSの方が加工が楽です。
ドリルの切りくずが気持ち良い円錐らせん形になります。
ドリルの切れ味を試すための材質って感じです。
プロはセンタドリルを使いますが、hinjyaはNACHIの特殊なやつでフラットな先端にヘソがあって
ピッタリの位置に穴あけしてます。
Φ6以上の大きな穴はタケノコを使います。
タップはなるべくスパイラルを選びますが、M2.6とか細いのでやむなくストレートで妥協しています。
加工したケースの写真です。

LEDレンズの位置が綺麗に揃っています。
思う
昨夜、半年遅れで公開になった映画を見に行ってきました。
夜8時以降は1900円→1300円に安くなります。
319席のスクリーンに10人ぐらいしか入っていませんでした。
映画の内容としては、ストライクのど真ん中でした。
バットを振り出すだけでホームランになります。
アスファルトには地上絵が必要です。(^^
2020/09/13 RTK-F9P 2CH
ZED-F9Pを基準局に1個、移動局に2個使用しました。
moving baseではありません。単純にRTKが2個です。
移動局の2つの座標からローバーの進行方向を計算して表示しています。
VTGのドップラー方位ではないので、停止時にも正しい方位になります。
動画はファイルを読み込んで表示していますが、リアルタイムの表示も可能です。

本当は、移動局のZED-F9Pの1個はZED-F9Rです。
手持ちのF9Pの数が足りなかったからです。
ZED-F9Rについて
おそらくZED-F9Pと同じMCUで、クロックも同じだと思います。
車速パルスの処理が増えた分、RTKの処理能力が下がっています。
ZED-F9Pでは全衛星種で10Hzが可能でしたが、ZED-F9Rでは衛星種を絞らないと10Hzで演算出来ません!
2020/09/14 RTK-F9P Trans 920Mhz と RTK-920MHz-3CH
3台の移動局からの座標と速度を10Hzで受信して表示しています。
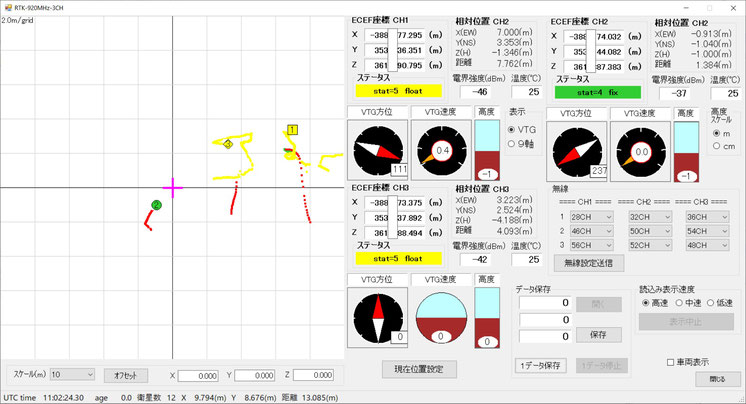

基準局からのRTCM3も合わせると920MHzを12チャンネル使用しています。
近日中に屋外で動作確認をします。
2020/09/15 アスファルトの地上絵マシーンのシミュレーション
アスファルトの地上絵マシーンの制御部分のプログラムをパソコン上でシミュレーションしました。
待ち基板が3種類あってハードが停滞しています。
ターゲットも等速運動しているなら目視線角を計算しますが、
地上絵ではターゲットが固定なので現在位置とターゲットの座標から進行する方位を決まています。
1)各ターゲットで停止した時に次のターゲットの座標への角度を決めて、その場で旋回しています。
2)ターゲットへ直線で進んでいる途中も0.1秒毎に角度を制御しています。
3)ターゲットまでの距離がゼロになったら次のターゲットへ進みます。
4)最後に円を描いていますが、現状は0.1秒毎に角度を変える多角形です。
円周上では常に一定の舵角を加えた方が良さそうです。
成功すれば半径1.2kmの地上絵を描けます。
まあ、そんな場所も無いし、そんな長持ちするクレヨンじゃなかった。。。
そんな大量の水を積めません。
思う
そゆえば、模型専門店が無くなっていました。
子供の頃にお年玉を握りしめてプラモデルを買いにいった店です。
今はプラモデルを作る子供がいないってことで需要が無いのでしょう。
プラモデルを作ることによって学び得ることもあります。
hinjyaは手先が器用な方ではなかったけど不器用でもなかった子供でした。
残念なことにモノが溢れた世界では子供が育ちません。
2020/09/17 アスファルトの地上絵マシーン 基板4枚
アスファルトの地上絵マシーンの基板4枚です。
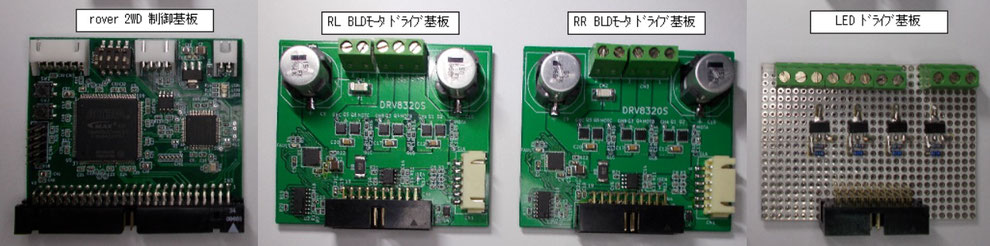
制御基板が変更になりました。
外付けRAMの無いFPGAではプログラムが入りませんでした。
FPGA+別MCUの構成です。
BLDCモータのドライブ基板2枚は「3馬力プロジェクト」で作った基板です。
このインホイール・モータはバランス・ボードでは36Vで駆動されていましたが、
アスファルトの地上絵マシーンでは13.5Vのリチウムイオン・バッテリにしています。
インテルは10年前のMAX V以降新しいCPLDを出していません。
前にも書いたのですが、CPLDより大きく、FPGAより小さなサイズのデバイスが欲しいです。
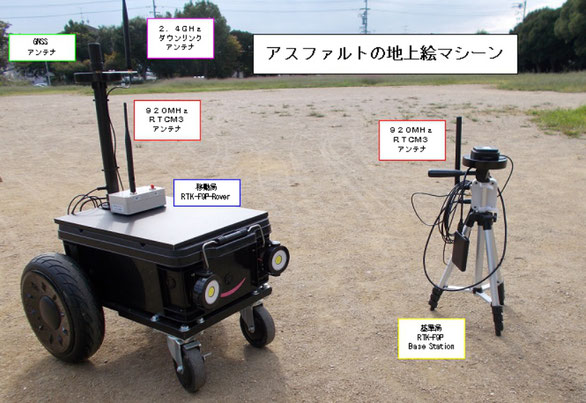
2020/09/20 アスファルトの地上絵マシーン ペイロード15kg
日曜毎度の小雨でしたがペイロードの試験をしてきました。
アスファルトの地上絵マシーンは小雨ぐらい気にしません。
15kgのペイロードに対応するために三輪車から四輪に変更しました。
また、コンテナ・ボックスの上下にある木の板は、雨に負けないよう
ダイソーにあった110円の黒板シートを貼りました。

15リットルの水なので15kgです。
この重さでもへっちゃらで動きます。
3分間だけ水跡を残せるように見積もりました。
移動速度4km/hだと1.11m/sになり、水を83.3cc/s消費させます。
75cc/mで地上絵を描きます。
まあ、足りなかったら20Lにします。
まだ自動モードは実験出来ませんが、RTK用のGNSSアンテナをポールの上に取り付けました。
ubloxのAMBで十分なのですが、このアンテナを感度を比べるために購入しました。
このアンテナの持ち味は軽量でスリムなのですが、グランド・プレーンを付けました。
動画です。
ヘッドライトとテールランプは動作によって点滅速度を変えています。
思う
奥にあるサッカーグラウンドで未来の「なでし子」達がライン引きをしていました。
巻き尺を持った子と、赤いライン引きを転がす何人かの子が小雨の中で頑張っていました。
たぶん、ライン引きもサッカーの練習の一部になっているので、自動化は不必要だと思います。
男子と女子でグランドサイズが違うのかなあ?
2020/09/22 9軸センサの苦戦
9軸センサのDMPから角度を出力させようとしていますが、苦戦しています。
なぜかマグネット・センサが動いてないようです。
それでも、6軸の状態でクォータニオンが出力されています。
たぶん、どこかの変数の初期設定がされていないか、DMPへの紐付けが上手くいってないんじゃないかなあ。
マグネット・センサへのI2Cも接続されていて、マグネット・センサのwhoamiも正常です。
yaw(方位)を知りたいのでマグネット・センサは重要です。
もう少し頑張ってみるか。
思う
DHLの発送のメールに配達日を指定するところがあったのですが、小さくて気付きませんでした。
いつもDHLの追跡でどこまで来ているか見ていただけで、追跡からは配達日の指定へたどり着けません。
日曜日の朝にはCHUBU NAGOYAまで来ていたのに、連休状態になっていました。
せっかく最短の航空便を選んでいるのだから初期値で最短になるようにして欲しいです。
この連休で大勢の人が移動していました。
コロナの感染の多い県の人は感染の少ない県へ遊びに来ます。
何か嫌です。
2020/09/24 ZED-F9P-3CH
3個のZED-F9Pを使って3次元の姿勢を演算するためのユニットです。
9軸センサも内臓されています。

治具にセットして動作を確認しました。
9軸センサのキャリブレーションが完了していなかったので、方位がずれています。
中央の三角形の板は段ボールです。せめてべニア板にしたかったです。
パソコンの画面をリアルタイムにキャプチャーしたのですが、編集したら超高速になってしまいました。
座標から計算した姿勢と9軸センサの出力を比較してみます。
思う
いつの間にか、日が短くなっていました。
5時ぐらいから作業を始めたのですが、6時になると薄暗くなってしまいました。
曇りだったからかも知れません。
明日は雨のようなので、夕方から急いで行いました。
RTKの実験は天気予報をよく見るようになります。
2020/09/26 RTK-F9P-Roverと3CH-920MHz-Receiver
ZED-F9P-3CHは1台の移動体に設置して姿勢を演算するユニットですが、
RTK-F9P-Roverと3CH-920MHz-Receiverは3台の移動体に別々に設置するシステムです。
公園で動作を確認してきました。
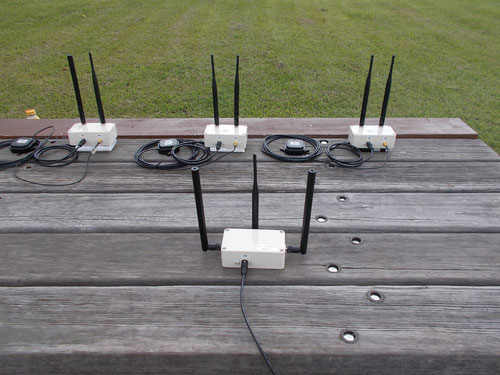
3CH-920MHz-Receiverのパソコン画面です。
テーブルの上にRTK-F9P-Roverを3台を置いて、順繰りに移動させた動画です。
この920MHz無線モジュールではRTK-F9P-Roverは2台までしか正常動作しません。
3台になると10Hzで出力されなくなります。
それぞれ別の無線チャンネルに設定していますが、3台になると混信するのかダメなんです。
無線チャンネルの設定を変更してみたり、3台の送信タイミングを微妙にずらしても効果はありませんでした。
思う
公園の芝が綺麗に刈られていました。
この公園で乗用タイプの芝刈りマシーンを見たことがあります。
ボディの下にカッターがあるマシーンでは、伸びきった草だと押し倒すだけで刈れません。
小まめに草刈りをしないと駄目でしょう。
草刈りと雪かきは無報酬の重労働なので楽出来るマシーンが必要です。
2020/09/27 アスファルトの地上絵マシーンにRTK-F9P-Roverを載せてみました
9軸センサが正しく動作するか確認しました。
9軸センサの方位はバッチリでした。
この9軸センサはICM-20948ではありません。
どうしても地磁気センサが動作しなかったので諦めました。
思う
今日、白い彼岸花を見ました。
何か得した気分です。
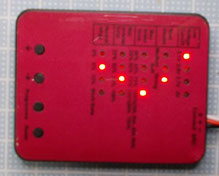
2020/10/01 アスファルトの地上絵マシーンの障害物検知
安い障害物検知の方法は超音波です。
レザーはピンポイントになりますが、超音波ならエリアを検出します。
画像処理では高過ぎます。
以前ドローンで使用した車用ソナーを再びクリックしました。1,779円でした。
センサーが4個あるので、前,後,左前,右前に取り付けます。
素晴らしいことに車用なので防水センサです。

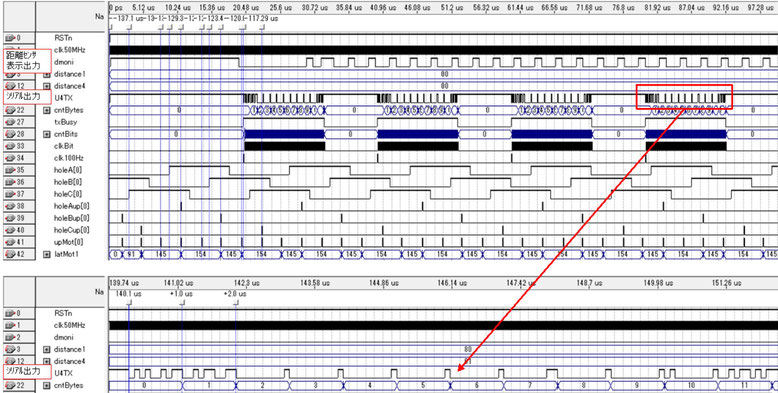
信号を取り込む方法は表示器への信号をデコードしました。

特殊なシリアル信号ですが、データが単純なので簡単に解析できました。
SYNCビットの後に33ビットの信号が出力されています。
1ビット目はダミーで、2ビット目以降に8ビット×4センサ=32ビットが続いています。
0.1m単位の距離が16進数で表現されています。
上図のセンサ1は0.5mになります。
0.3m以下は0.0mになり、0xffは障害物無しです。
本体と表示器にはそれぞれSOIC8ピンのPIC風マイコンが使われていました。
パッケージの型番等が消されていました。
特殊なシリアル信号なので、直接MCUへ入力しないで速度カウンタ用FPGA内でデコードさせました。
よく見るとセンサには取り付け方向があります。
周りのツバが飛び出している方向を下(地面)にしました。
その方向には超音波の飛びが弱くなります。
それでも、地面からのセンサの高さが20cmしかないので、そのままでは地面を検出していまいます。
本体内部のオペアンプのゲイン用抵抗を変更して感度を下げています。
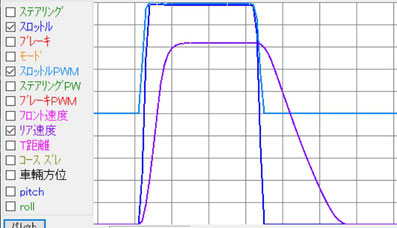
速度カウンタと距離デコードのFPGAの波形です。
NIOS2無しのVerilogのみで作ったロジック回路です。
思う
いつもながら、よくこの値段で作れるなあと感心します。
恐るべしC国パワーです。
2020/10/05 アスファルトの地上絵マシーンの障害物検知 その2
超音波センサーを4方向に取り付けました。

感度調整用のボリウムを取り付けましたが、感度を下げなくても地面を検出しませんでした。
調子良く障害物を検知します。
今日、初めて自動運転のデバッグをしましたが、全然ダメでした。
真っ直ぐ走れませんでした。(TT
アスファルトの地上絵マシーンの制御はhinjyaが独自に作っています。
真っ直ぐ走る時には、目標とするターゲットまでの直線ラインを数式化して、
そのラインに対しての車両位置の偏差をPIDして舵角にしています。
制御には遅れが付き物なので、車両位置を現在位置より先に進めておきます。
少し先の車両位置の推定は、直前の座標から最小二乗法の2次関数で行っています。
円を描く時には、車両位置が円の外側なら内側になるよう舵角をあて、
車両位置が円の内側なら外側になるよう舵角をあてています。
この辺の座標演算や制御の演算は数1までの算数レベルで行っています。
三角関数を使ったり、座標上で交点を求めるために連立方程式を解いています。
倍精度FPU内臓の200MHz32bitMCUなので演算速度は楽勝です。
直線の制御方法としてターゲットまでの角度の偏差で制御する方法も考えています。
近日中に動くよう頑張ります!
思う
先週末に地元の企業のサークルとLAB系の展示を見に行って来ました。
楽しい電子工作が出品されていました。
いっぱいした質問に丁寧に答えて頂き、感謝しています。
会社の製品だと、高度に完成されてしまっていて「遊び」の部分がなくなってしましますが、
サークル活動なら自由で楽しいモノが作れます。
これからも頑張って下さい。
2020/10/06 アスファルトの地上絵マシーンの直線制御
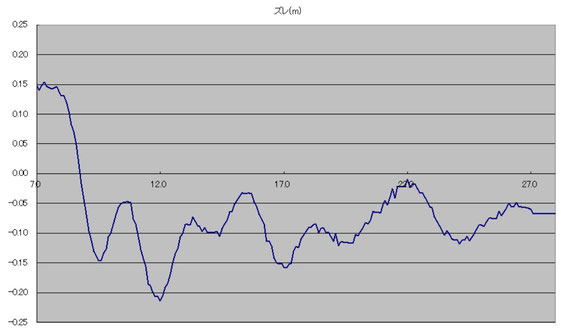
直線制御の現状グラフです。

右にズレている時には右タイヤは速く回り、左にズレている時には左が速く回っています。
しかし、ズレが段々大きくなるハンチング状態です。
考えてみれば当然です。
右にズレている時に左を向かせて目標ラインに乗っても、そこから真っ直ぐ走ろうとしても
車体の向きは左を向いているから左に行ってしまいます。
その行き過ぎた左ズレを直そうと、より右へ向こうとします。
車を運転している時に無意識のハンドル操作をしていますが、
右ズレから左へハンドルを切って目標ラインに乗る少し前からハンドルを真っ直ぐに戻し始めます。
そうしないと、目標ラインに乗った時に車が目標ラインの方向を向いていません。
目標ラインに乗った時にハンドルを真っ直ぐに戻して遅いのです。
これが「車両位置を現在位置より先に進めておく」ってことなのですが、その辺の詰めがまだです。
楽しみながらデバッグしています。
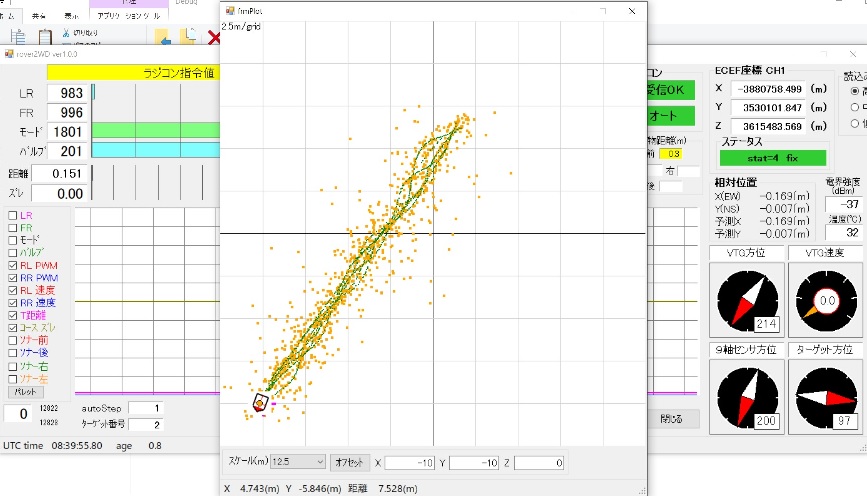
2020/10/07 アスファルトの地上絵マシーンの直線制御 位置推定
マシーン内部のMCUで1秒後の位置を推定してダウンリンクさせてみました。
オレンジ色が1秒後の推定位置、緑色が実際の走行ラインです。
その場での旋回中は無視ですが、真っ直ぐ走る時には概ね良さそうです。
少しフィルタを掛ければ使えそうです。
AVIからmpegへ変換すると速度が速くなってしまいます。
9軸センサの方位だと苦労するので、RTK-F9P-2CHでF9Pを2個使って座標からの方位で制御します。
思う
A国の偉い人が退院しました。
周りの人にうつさなければよいんだけど。
このウィルスはその人物が他人に迷惑をかけても自分の欲を通すかどうかが分かります。
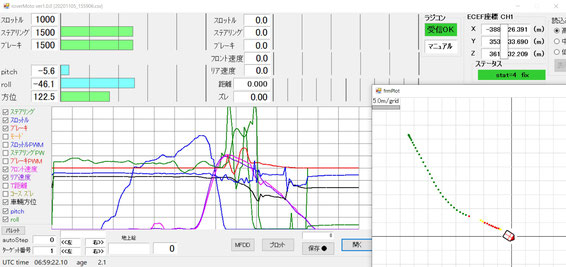
2020/10/11 アスファルトの地上絵マシーン 自動運転始めました
屋内でパソコンから座標を送るデバッグ用のソフトである程度動作するようになったので、
公園で動作確認をしてきました。
公園内で広い場所って芝生のトコしかないので、そこで動作させました。
PIDの設定が甘いのか、制御アルゴリズムが悪いのか、まだ直線に走れていません。
走行パターンの設定は、方位35度へ20mの往復です。
ラジコンのプロポで自動運転モードを選択して、1回スロットルを入れるとその座標を基準として動作します。
方位35度へターンした後に走り始めます。
20m先の座標のポイントで停止、180度ターンして戻って来ます。
自分は犬が好きではないのですが、ボールを投げると拾って戻ってくる犬のような感覚になりました。
なんて可愛いマシーンなんだああぁ。
2往復走行したラインと推定位置の画面です。
推定位置がまだ安定していません。
全体的に精度を上げなくてはなりません。
そうそう、勿体無いのでRTK-F9P-2CHはヤメました。
ターンする時の方位は9軸センサのyawを使っています。
そのままでは周りの磁気の影響を受けるので、VTGの方位で補正しています。
また、手動モードも、自動運転モードでも速度制御をしています。
手動モードのスロットル100%の時の速度をパワーの範囲内で自由に設定可能です。
自動モードでは走行速度の設定をしています。
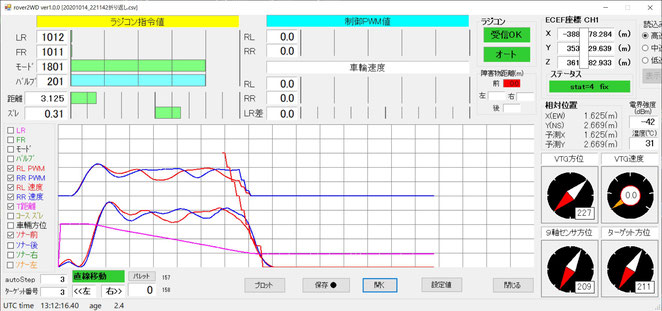
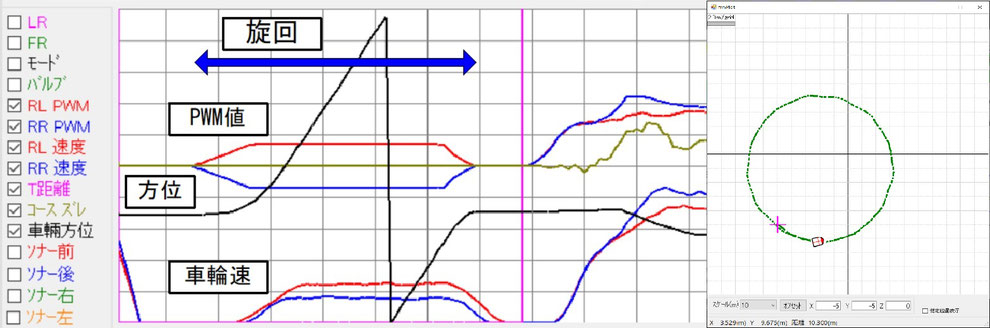
同じ方位と距離でアスファルトで走行した時のデータを再生しました。
左の一番下のコースからのズレを表示しているバーグラフと右一番下の左右の速度差で制御状態が分かります。
芝生と違って推定位置も安定しています。
芝生ではアンテナポールが揺れるので、座標もばらつくし、VTGの方位と車速も揺れていますが、
アスファルトでは安定しています。
画面チャプチャーからだと表示速度が変になるので、カメラで画面を撮りました。
2020/10/12 アスファルトの地上絵マシーン ダウンリンク
マシーンからパソコンへデータをダウンリンクして、リアルタイムにグラフの表示とデータの保存をしています。
また、パソコンからマシーンへ設定値の変更も行っています。
このダウンリンクはデータ量が少し多いので920MHzでは間に合いません。
2.4GHzのXbee3を使用しています。
送信出力+8dBm、見通し最大1200mになっていますが、実際は全然届きません。
以前XBee3 DigiMesh 2.4で使用した基板が余っていたので、XBee3 802.15.4で単純にシリアルを無線化しています。
パソコンからのUSBはFT232HXでシリアルに変換しています。
ちなみに、Xbee3をどのfunctionで使うのかはXCTUでファームウェアの書き換えを行います。

手持ちにあった部材で作りました。
思う
日本国内で無線モジュールを使う時には「技適」の通ったモジュールにしないといけません。
「技適」はモジュール本体、ケーブル、アンテナのセットで申請されています。
しかりしたホイップアンテナで申請した10mW出力の無線モジュールが売っていません。
2.4GHzでも1km以上飛ばしてみたいなあ。
2020/10/14 アスファルトの地上絵マシーン 障害物検知の実験
前方に段ボールの箱を置いて、ちゃんと停止するかを実験で確かめました。
グラフの赤い線が前方の障害物までの距離です。
0.1m単位で0.9mから検出して0.3m以下は衝突です。
1.6秒ぐらい前から検出していますが、急停止させずに徐々に減速停止させています。
15kgの水を積んで急停止は危険です。
スロー再生した動画です。
前方のセンサが1個しかないので、小さな箱では検出出来ませんでした。
それでも。。。
「アスファルトの地上絵マシーンには付いていないの?」
「前にも、後ろにも、右も、左にも付いとるんじゃあ」
と納豆を混ぜながら言ってみたかったのです。
2020/10/16 アスファルトの地上絵マシーン トレーニング中
PIDのパラメータをつめるために公園へ行ってきました。
10mの直線と円を描きました。
動画もあります。
減速ギアの無いインホイールモータなので極低速域での制御が難しいので
その場での旋回がイマイチです。
そのあおりで、旋回後の直線や円弧の移動の開始から3mぐらい蛇行が激しいです。
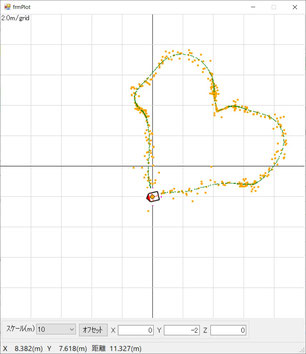
ハートなんかも描いてみました。←まだハートには遠いです。
緑の点が走行の軌跡です。黄色は0.9秒後の推定位置です。
明日は雨だそうです。
屋内でシミュレーンしながらデバッグします。
設定した図形で移動した時のNMEAをシリアルで出力するプログラムです。

線と丸を描いた時のパソコンの画面です。
2.4GHzでダウンリンクしています。
PIDの設定は始めて直ぐの時なので、かなり蛇行しています。
ジオイド高の地球の様なジャガイモになっています。
アスファルトの地上絵マシーンは目に見えないラインをトレースしています。
ローコストなRTKにより地球上にセンチメートル単位のグリッドを引いています。
RTKって、地球って星を1センチの方眼紙でラッピングしているのです。
少し精度が落ちますが、高さ方向にも何層にもミルフィーユの様に重なっています。
地球上のどの場所でもピンポイントなのです。
このマシーンを作ることによって普段している無意識の動作「真っ直ぐ走るとは」を考えたり、
「円って何」とかを考えさせられました。
「円を描く」には中心からの距離が一定になるように走行すれば良いんです。
「真っ直ぐ走る」には右にズレていたら左へ、左へズレていたら右へ操舵すれば良いのです。
「速度を一定に保つ」には速度が低い時には増速し、速度が高い時には減速すれば良いのです。
古典的なフィードバック制御のPIDで制御しています。
もう少しPIDの設定をつめて綺麗な絵にします。
あと、旋回問題もソフトで何とかします。
思う
キンモクセイなのかな、香りが少し強いなと感じます。
嗅覚は正常です。(^^
綺麗な絵が描けるようになれば。。。2kmの地上絵です!!
これってGPSアートに入るのかなあ?
2020/10/19 アスファルトの地上絵マシーン 定常旋回の繰り返し精度
5mの円を10周回って繰り返し精度を実験してみました。
ZED-F9Pはセンチメータ級なのに、制御(PIDパラメータ)が悪くてサブメータ級になってしまいました。
最後の詰めを頑張らないといけません。
2020/10/21 ZED-F9Pのファームウェア
先日、ファームウェアのバージョンを1.13にしましたが、1.11へ戻しました。
ファームにバグっぽいトコがあって、しぶしぶ戻したのです。
hinjyaの使っている範囲で気付いたバグは2か所です。
1)UBX-CFG-PRTのI2Cをnoneにできない。
F9PのMCUに余分な処理をさせないよう、使用していないPORTはnoneの設定にしていましたが、
1.13ではI2Cをnoneにしようとすると、他のPORTの設定がクリアされてしまいます。
おそらく、処理の先頭で出力のフラフを見て、出力がなければそのルーチンを抜けていると思うので
UBX-CFG-MSGがチェックオフになっていれば大丈夫でしょう。
2)GNGGAのageが出力されなくなってしまう。
1度FIXした後に、RTCM3が切断されてDGNSS Timeoutを過ぎてsingle測位になった後で再びRTCM3を入力した時に
ageが出力されなくなります。測位はFIXされます。
ageはRTCM3がF9Pへ正常に入力されているかのバロメータなので重要です。
ファーム1.11では上記2点は正常に動作します。
F9Pをsingle測位ではなくRTKとして使用するならSBASは不要です。
RTK-F9P-2CHはmovingbaseではなく、単純にRTKを2個使用して、相対的な方位を2つの座標から演算していますので、
movingbase機能よりageの表示の方が重要だと判断してフォームを戻しました。
思う
すっかり秋っぽくなりました。
hinjyaの住む田舎では、その日のコロナの発表に応じて夜の人通りが変わります。(^^
発表があった時点でその人を避けようとしても遅いと思います。うつすならもっと前にうつしています。
しかも、その人は外出を控える(隔離される)ので更に無意味です。
昼間は濃厚接触し放題なのに不思議です。
日没後にウィルスの数が上がるのでしょうか?(^^
夜が危険なのではありません。不特定多数の人との濃厚接触が危険なのです。
2020/10/22 旋回制御
極低速域が厳しいので、制御を少し変更しました。
1)旋回角度が設定角度以下の場合には+360度の旋回をする。
2)旋回時には速度制御をしないで設定したPWM値にする。
3)旋回時のPWMは固定1秒の加速、設定角度手前から減速する。
旋回の角度が悪いと、その後の直線や円弧の移動開始後に大きな影響を残します。
移動開始時にも制御に手を入れた方が良さそうです。
10mの六芒星に挑戦しました。

まるでhinjya、いえ、忍者の手裏剣の様にベコってます。
思う
草刈りから雪かきの季節になりそうです。
hinjyaの住んでるトコは雪が滅多に降りません。
スタッドレスを履いている人はいません。
もちろん、雪かきなんてしたことがありません。
それでも。。。6輪の雪かきマシーンを作りた~いよう。
雪が無いとブルドーザーになっちゃいますよ。
2020/10/25 旋回制御の忘れモノ
何か忘れていると思ったら、旋回制御のPIDをしていませんでした。
旋回は方位のフィードバック制御をしなくてはなりません。
アスファルトの地上絵マシーンは安く作るようRTKを1個しか積んでいません。
2個使えば座標から簡単に方位を計算できますが、安い9軸センサの方位を使っています。
この方位が振動や周りの磁気の影響でズレ易いのです。
そこで、VTG方位ので補正しています。
VTG方位の方位は搬送波のドップラーから計算しているようで、停止中や極低速では正しく出力されません。
設定速度以上の時にリアルタイムに補正をしています。
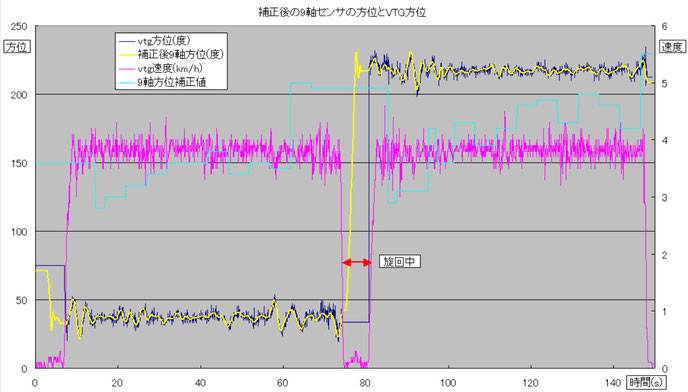
・黄色の補正後9軸方位と紺色のVTG方位が一致しています。
・補正後9軸方位は旋回中でも出力されています。
設定画面はこんな感じになりました。
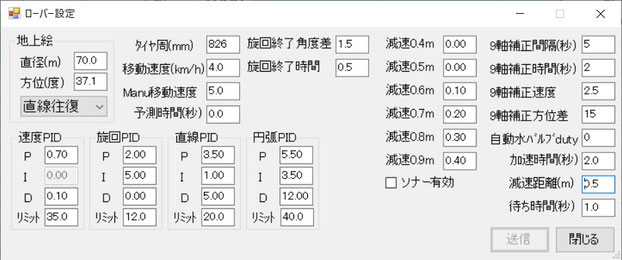
設定するPIDが4種類になりました。
70mを往復した時のサブメータ級の制御のズレです。
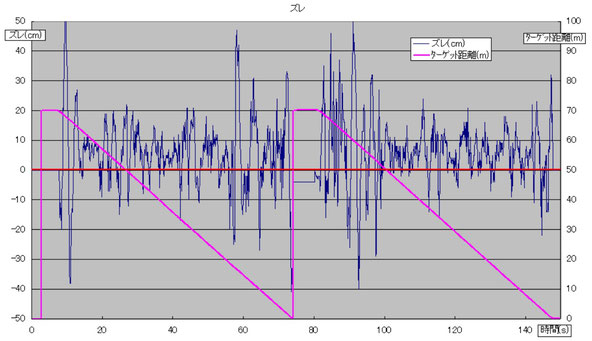
悪い箇所で±50cm、良くても±15cmになってしまっています。
速度制御は50Hz、位置制御を10Hzで行っています。
何かもう一工夫足りていません。
速度パルスは15極×3相×両エッジ=90P/Rになっていますが、ジッターがそこそこあります。
思う
最近、あの犬型ロボットの足が流行っているようです。
モータ数の削減と制御のし易さでそうなったのでしょうが、人型までも影響されています。
関節が逆に曲がっているようで、何か好きではありません。
2020/10/27 ズレの勘違い
今まで見ていたズレは予測した0.9秒後の車両位置とコースのズレでした。
実際の車両位置とコースのズレは、もう少し良かったです。
散水がどんな感じか試してみました。
GNSSアンテナの下にホースが出ています。
このホースは熱帯魚のエアレーション用で針金が入っていてフォーミングが可能です。
水は15リットルなので15kgです。

マス集中を無視してフロントに荷物を積んでいるので旋回とか厳しいです。
水バルブはDUTY制御で流量を可変可能にしましたが、100%の常時オンでもちょろちょろとしか出ていません。
水タンクが920MHzの感度を下げちゃうか心配していましたが、大丈夫でした。
思う
以前購入した2輪のラジコンが停滞したままでした。
2輪のラジコンに搭載可能な制御ボックスを作りたくなっちゃいました。
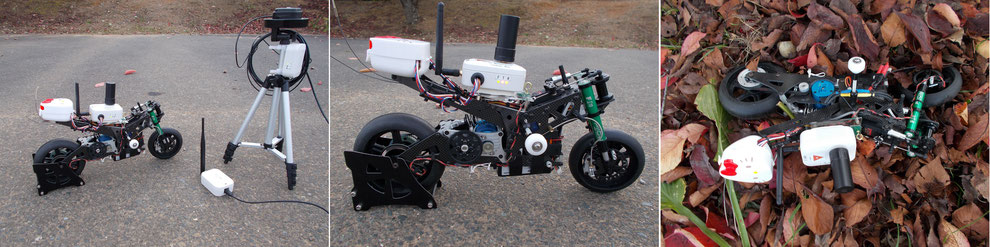
2020/10/28 RC Motorcycle Control Box
ってことで、2輪のラジコン用の制御ボックスのハードウェアを作りました。

ケースの重量が余分に加わりますが、基板をむき出しで使うのは。。。ちょっとなあと思います。
基板は、RTK Base2020,XBee3,9軸センサ,ZED-F9Pの4枚構成です。
ブロック図になります。
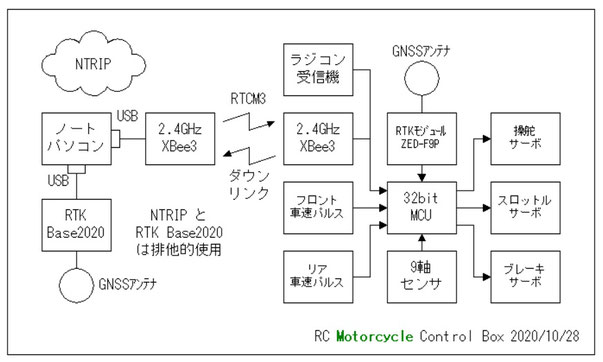
NTRIPかRTK Base2020のRTCM3を2.4GHzで送信します。
また、同じ2.4GHzで車両の状態をダウンリンクします。
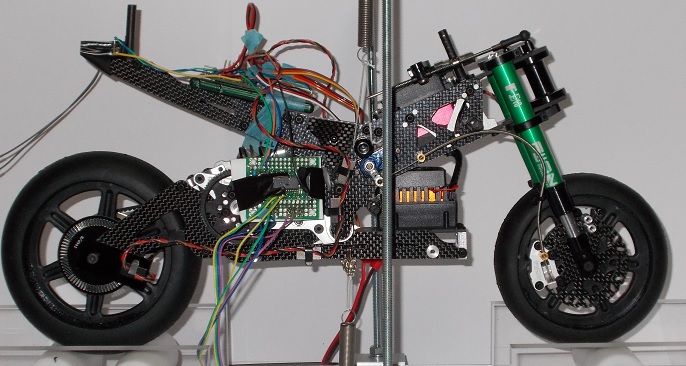
車両に転倒時の保護ステーを付けなくてはなりません。
ラジコンなのでライダーは乗りませんが、マシーンを保護しないと開発の最後まで持ちましぇん。(^^
忘れ去られたマシーンの写真です。
オンロードですので、アスファルトでしか走れません。
後は、ソフト作りです。
今までに作ったサブルーチンをかき集めれば直ぐに出来そうです。
思う
またしてもクラスターが発生してしまいました。
ワクチンが出回るまでは「新しい生活様式」をしましょう。
2020/10/30 RC Motorcycle Control Box ローラー上の走行
久しぶりにローラー上で走行させました。
本当は、30km/hまでスピードが出るのですが、ローラーから飛び出さないか心配で
ビビりながらスロットルを上げています。
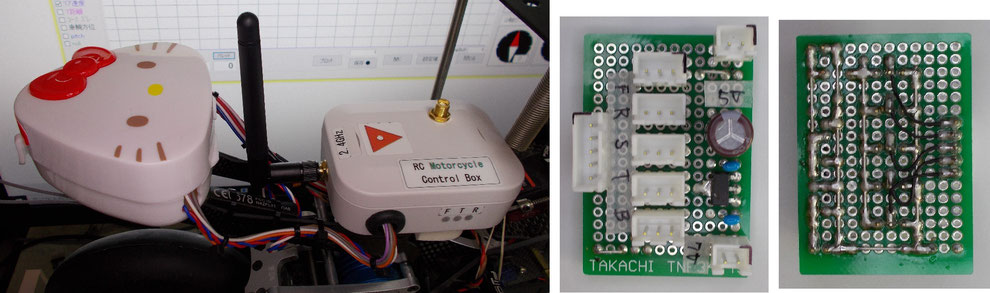
テールにあるキティちゃんのボックスにはラジコン特有のサーボ系の分配基板を入れています。
7.4Vのバッテリから5Vを作る3端子レギュレータと
サーボへの電源を供給しています。
Control Boxの基板は基準局で使っているやつで、ラジコン専用に起こした基板ではありません。
どうしても分配基板が必要になっちゃたんです。
思う
hinjyaは100均が大好きです。
キティちゃんのボックスもそうですが、
Control Boxの下に振動対策として敷いているスポンジのファンデーションパフも100均で買ってきました。
100均の店の中をウロウロ歩いて何か良いモノがないかと探すのがとおっても楽しいんです。
Riding high
You are the lonely rider I know
Riding high
I love you more than you'll ever know
you're going too fast
you beter think twice ... oh no ...
2020/11/01 アスファルトの地上絵マシーン 足回り変えました
走行音が激しいので「緩衝スプリングキャスターVゴム車輪」に変えました。
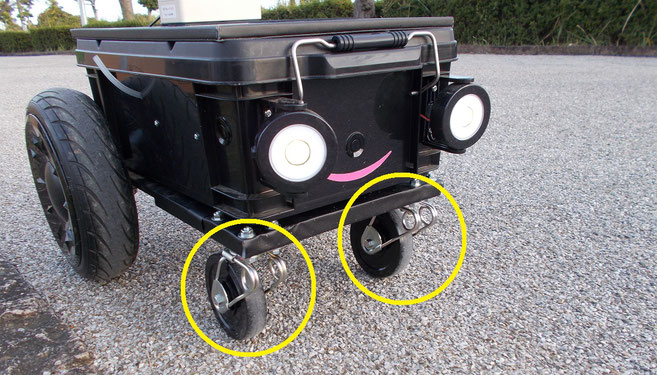
よく、キャスター付きの旅行バッグを転がしている人がいますが、
それと同じで走行音が非常にうるさかったのでゴム車輪に変更しました。
また、緩衝スプリングにすることで少しでもアンテナの揺れが減ることを期待しました。
衝突安全の動画を撮りました。
何故か今日はFIXしませんでした。
FIXしないと自動で直線走行が出来ないので、手動でクネクネ走ることになります。
なかなか段ボールまで真っ直ぐ走れずに苦労しました。
思う
公園で変な実験をしていると小さな子に話しかけられることがあります。
女の子は積極的に話してくるのですが、男のは近寄って見ているのですが黙っていることが多いです。
子供の頃は女の子の方が精神年齢が高いからでしょうか?
2020/11/03 M Motorcycle の制動試験
この1/5サイズのラジコンのオートバイにはフロントにフローティングタイプのカーボン製ディスクブレーキが付いています。
どの程度の制動能力があるのか試験してみたくなりました。

しかーし、前後のローラーを繋いでいたタイミングベルトが切れてしましました。
もともとゴム用のボンドで継いだだけなので、ブレーキを掛けた時の引っ張りに耐えられませんでした。
とりあえずリアの回生(?)ブレーキの能力です。
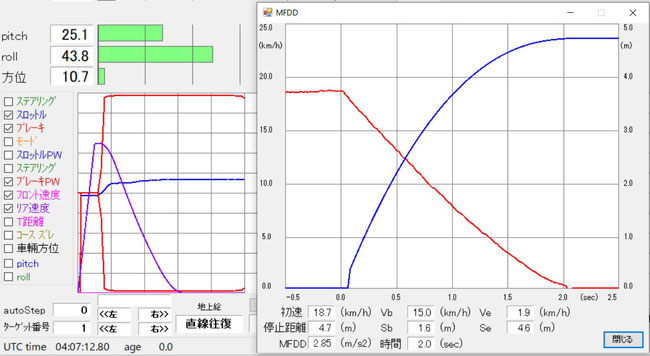
実車と同様にMFDDを測定しました。
2.4GHzのダウンリンクは10Hzですが、車速はMFDD計算用に50Hz分を送信しました。
※このローラーには負荷が掛かっていません。実際の走行の停止距離とは違います。
思う
今日は感染経路不明の人が沢山出てしましました。
知りたいのは誰が感染したのではなく、何処へ行くと危険なのかです。
危険な場所には近付きたくありません。
2020/11/05 RC Motorcycle Control Box 屋外でのFIX
屋外でのFIXを確認するついでに、ちょこっとだけ試走してみました。
公園の狭い駐車場で走らせたので、直ぐに転倒したり、ラフへ突っ込んだりして、まともに走らすコトができませんでした。
ZED-F9Pと高価なアンテナなのでFIX具合は申し分無かったです。
オートバイのラジコンの運転は初めてだったので感動しました。
たいしてスピードを出していないのに、ピューと走って行ってしまいます。
転倒の仕方が悪いとFIXが外れます。
走行中の動画が撮れませんでした。
スピンには転倒防止のガードを使ってバンクさせたまま回しています。
スロットルはラジコンプロポ100%の時の速度を設定しています。
また、ブレーキとステアリングは何%のPWMを出力するか設定しています。
バッテリの電流容量が小さいのか、電圧が降下して変な動きをする時があります。
ブレーキを強く掛けるとリセットされてしまいます。
2回ぐらいコンクリートのトコに激突しました。
前にバンパーの様なガードが欲しいです。
思う
A国の大統領選が激戦しています。
若者が最後まで票を数えるよう訴えていました。
hinjyaは青を応援しています。
2020/11/07 M Motorcycle のフロントブレーキのMFDD
いつの間にか、Mタロウも個人の注文を受け付けるようになっていました。
購入した前後のローラーを取り付けました。
もちろん、エンドレスのタイミングベルトです。
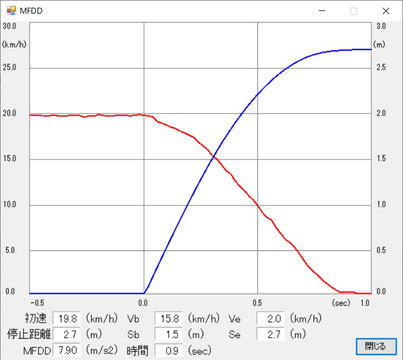
MFDD値が7.90でした。
乾いたアスファルトの摩擦係数0.8でダウンフォースの無い状態なら重力加速度の1Gの0.8倍、
すなわち7.84m/s2でロックします。
満足の値でした。
思う
つ、ついに地方都市に第3波が来ました。
それでもマスクをしないでフラフラしている人を見かけます。
マスクをしないで大声を出している人を見かけます。
地方では新しい生活様式は無理なようです。
2020/11/11 RTCM3のメッセージのデコード
hinjyaはS岡大学さんの善意の掲示板からNTRIPさせてもらっています。
このNTRIPをそのまま920MHzで再送信するとデータ量が気になります。
少しでも小さくしたかったので、
RTCM3をデコード=>一部削除=>RTCM3をエンコード=>920MHzで再送信
を考えました。

920MHzだけじゃなく、2.4GHzでも10Hzでダウンリンクしていると欠損が生じます。
NTRIPしたデータの中から仰角が低い衛星のデータを削除します。
そのためにRTCM3をエンコードしました。
まあ、RTKLIBっていうお手本のソースがあるのでC言語からVB.NETへ移植しただけなんですが。
RTCM3のメッセージの種類については下記ホムペに書いてあります。
https://www.use-snip.com/kb/knowledge-base/rtcm-3-message-list/
S岡大学さんのNTRIPで得られるデータの一覧です。
1006 Stationary RTK Reference Station ARP with Antenna Height
1008 Antenna Descriptor and Serial Number
1013 System Parameters
1033 Receiver and Antenna Descriptors
1077 GPS MSM7
1087 GLONASS MSM7
1097 Galileo MSM7
1117 QZSS MSM7
1127 BeiDou MSM7
1230 GLONASS L1 and L2 Code-Phase Biases
1019 GPS Ephemerides
1020 GLONASS Ephemerides
無料で使わせてもらっているのに何ですが、このへんも送信していただけると嬉しいなあと思います。
1042 BDS Satellite Ephemeris Data
1044 QZSS Ephemerides
1045 Galileo F/NAV Satellite Ephemeris Data
1046 Galileo I/NAV Satellite Ephemeris Data
エフェメリスが無いと衛星の仰角が計算できません。アルマナックでも良いのですが。
それか、送信するMSM7の衛星に仰角マスクしてくれないかなあ。。。って希望です。
思う

最近、明るいニュースがありません。
そこで、ちょこっとハッピーになれるよう多肉植物を買ってみました。(^^
だいぶ寒くなっちゃったけど、あんまり世話をしなくても枯れないでいてくれそうです。
2020/11/14 RTCM3のメッセージのデコード その2
久しぶりにRTKLIBと格闘しました。
S岡大学さんからのNTRIPをRTKLIBに入力した画面です。
普通にRTCM3として使用するのにはOKです。

アンテナ位置がSINGLE測位されています。
全部の衛星が表示されるようにCOM6へF9RからRXM-SFRBXでエフェメリスを入力しました。
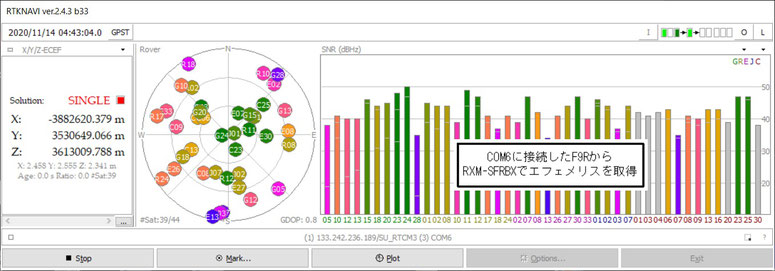
全種類の衛星が表示されるようになりました。
※一部の表示されない衛星はhinjyaのアンテナが壁ドンだからです。
S岡大学さんからのRTCM3の信号はL1,L2,L5と3周波なのですが、ZED-F9Pは2周波です。
L5の信号を削除して、30度の仰角マスクをしてRTCM3を再構築したものをbaseに入力しました。


おそらく、ZED-F9Pは演算能力からRTKに使用する衛星数を高仰角、高信号レベルから12個に絞っていると思います。
RTKLIBの#Satが42->24へ減っています。
送信バイトが1400bytes/secが637bytes/secへ半分以下になりました。
回線スピードの出ない無線でRTCM3を送信する手法として提案してみた~い。。。みたいな。
思う
小春日和だったので多肉植物達に水やりと日光浴をさせました。
のどかだぁ。
hinjyaのRC Motorcycle Control Boxはこのへんを目指しています。<-目標は高く持ちましょう!
BMW Self-Riding Bike.
https://www.youtube.com/watch?v=V__5_2JN30s
乗車の走行でコースを覚えこませてRTKで再生自動走行しているのかな?
RTKで取り込んた座標以外にも、舵角やスロットル開度、ブレーキ量、車両姿勢をトータルでつじつまが合うように
再生しないと2輪車では上手く走行しないんじゃないかな。4輪よりシビアそうです。
後ろのランチボックスに制御系が詰まってますね。

2020/11/19 RTCM3のメッセージのデコード その3
NTRIPしたRTCM3を920MHzで再送信する「920MHz 1CH 送信機」もRTCM3カッターを実装しました。

S岡大学さんから受信した1,385バイトのRTCM3を720バイトまで52%へ削除して920MHzで再送信しました。
もちろん、この20度で仰角マスクした2周波のRTCM3でZED-F9PはFIXします。
※hinjyaのF9PはQZSSを除外してるのでQZSSの送信のチェックボックスをオフに設定しています。
RTCM3のMSM7のフォーマットです。
あんまり詳しくは公表しちゃダメだと思うので、各データの詳細についてはナイショです。高価な仕様書を購入して下さい。

衛星数と周波数の数で可変長になっています。
善意の基準局様は少しで多くの信号を送信しようとします。
使用者側は必要な信号だけを使うように工夫が必要です。
思う
hinjyaは店に入る時には必ずマスクをしますが、道路上で半径10m以内に人がいない時にはマスクを外します。
やっぱマスクはうっとおしいです。
通するのが先か、感染するのが先か、見通せません。
2020/11/21 RC Motorcycle Control Box の逆操舵
初めての自転車での遠征は幼稚園児の時でした。
その時既に補助輪を外していて、2km以上先にある幼稚園まで友達と遊びに行ったことがありました。
自転車の練習をした記憶は古過ぎてありません。
2輪車がどうやって曲がっているなんて、無意識の世界の話でした。
何となく曲がりたい方向を見ていると曲がって行くような。
走り出したら自分でハンドルを操作することはありません。
この事をネットで調べると「セルフステア」って単語に辿り着きました。
この先人が分かり易く説明してくれています。
http://www.gyaaan.net/entry/2018/06/08/224757
M Motorcycle を試走させた時に反対の方向に曲がってしまい、?って思いました。
ベースになっている車両の FIJON FJ9131 はサーボでステアリングを左右に切っています。

2輪の場合、4輪の様に左に曲がりたい時にタイヤを左へ曲げてはダメなんです。
逆操舵だったんですねえ。
たしかに、ローラー上でもそんな動きをしていました。
プロポの受信信号とサーボの間にMCUが入っているので、計算式に-1を乗算すれば反対方向に動くように変わります。
逆操舵の動画です。
思う
我慢の3連休だそうです。
hinjyaはお酒を全く飲みません。
家にあるのはIPAぐらいです。
だから飲みに行くのを我慢するってのが分かりません。
新しい生活様式に合った別の楽しみ(お金の使い方)を探しましょう。
2020/11/23 RC Motorcycle Control Box の速度制御
何だかESCの応答性が悪くて速度制御が出来ていません。
ESCの設定をするカードで設定を変更してみました。
普通、ラジコンのサーボへは動作量の幅のパルス信号を入力します。
んっが、モータ制御用のESCは電源投入時に設定値の状態を出力してきます。
こんな信号です。

このESCには5項目の設定があります。
1)Low Voltage Cut-Off
2)Start modes
3)Max brake force
4)Max reverse force
5)Neutral range
Start modes をStrongにして、Max brake force を100%に変更してみましたが、
全然、応答性が変わりませんでした。
ん~、困った。

ラジコンってこんなんでしょうか?
でも、ブレーキのないラジコンカー何かで、減速が出来ないと困っちゃうと思うんだけどなあ。
思う
オンロードのラジコンって走らす場所が無いんですよね。
それでオフロードの2輪巨大ラジコンが出回ったのかなあ。
2020/11/26 M Motorcycle のモータ変更
ラジコンの安いモータはセンサレスのブラシレスモータです。
どの程度のレス・レス制御をしているのか不明なんですが、無理があると思います。
繋げるモータの種類が沢山あるのにチューニングが無いなんて。
ってことで素直なブラシモータに変更しました。

危険な事に端子部の金属がむき出しです。何かに接触したら即ショートします。
端子のトコに小さな基板が付いていて、ノイズ対策用のチップ・セラコンが3個載っていました。
暗闇で見るとブラシのトコで火花が飛んでいました。
ブラシレスからブラシモータに変更したら応答性が良くなりました。
モータ始動時の極低回転からでもトルクが出ているのでスロー・スタートが可能になりました。
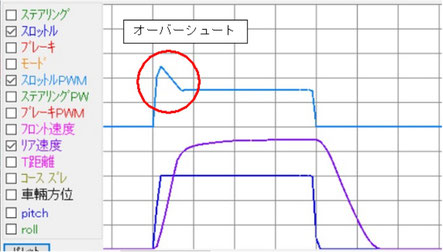
また、ESCへのPWM信号に手を加えて、スロットルがオフからオンになった時にオーバーシュートするようにして
応答性を少し上げました。
それと、ESCとモータの特性からプロポのスロットル0~100%の時にESCへ30~80%の
PWMが入力されるようスケーリングしています。
ESCへ30%以下の信号を入力してもモータが回転を始めなかったからです。
このESCは入力80%の信号でモータへはDUTY100%(直流)になっていました。
短いパルス幅でチョッピングするとモータに良くないからでしょうか。
そうそう、フレーム下部に180gのウェイトを取り付けました。
重心を少し下げないと真っ直ぐ走れません。
2020/12/05 M Motorcycle のESC
ブラシモータ、ブラスレス・センサー付き、ブラシレス・センサーレスの3種類のESC基板を注文しました。
ブラシレス・センサーレスはクローズド・ループの速度制御が可能なデバイスがあったので試すことにしました。
35μの4層基板で3つの層を使って電流を流してるのでビアを打ちまくりました。
パターン的には30A程度ですが、短時間なら40Aまでいけそうです。
最近出たPIC16F15244T-I/SSって1個77円のマイコンで制御しています。
ラジコンのサーボ指令1~2msのPWM信号をモータ速度制御用のPWM信号へ変換しています。
FETは2個入ったハーフブリッジなので3個あればブラシレスモータを駆動できます。
一般的にはミドルレンジのマイコンで直接レス・レス制御をしますが、結局ハイサイドのFETのドライブがあるので
何らかのデバイスが必要になります。
安いマイコンでハードウェアのデバイスに制御を任せる方法を検討してみました。
まあ、このクローズド・ループの速度制御ってポンプやファンなんかの一定速向けで加減速には不向きだと思うけど
もしかしたら上手くいくんじゃないかと淡い期待です。
infineonにMCUとFETのドライバが1つにまとまったデバイスがあって、BLDC Shield for Arduinoも販売されています。
サンプルのソースコードが不明だし、デバッグ環境も不明だし、手を出すと奥が深そうです。
勝手にリンクしときます。
思う
ラジコンってかなり無理して電流を流してませんか?
本当に50Aも流して大丈夫なの?
最近CPLD内臓のPSocを見かけなくなったなあって感じていたら、コロナ過の中infineonとくっ付いていました。
パワー系とマイコンの結婚です。
良縁だと思う。
2020/12/07 M Motorcycle の旋回
ラジコンモードで旋回してみました。
ラジコン素人のhinjyaにとってホイールジャイロの無い2輪はレベルが高過ぎます。
この広さでは車体を引き起こした後にちょこっとしか真っ直ぐ走らせられません。
ブラシモータの影響で前輪の車輪速にノイズが乗っています。
あ~、どっかに広い場所無いかなあ。
2020/12/20 ESC Sensored Brushless Motor の失敗
基板を起こしていると失敗することもあります。
表面実装部品が多いのでユニバーサル基板での動作確認が出来ないからです。
FETアレイを使ったのですが、DRV8320SのVDS_OCPエラーステータスが立ってしまいました。
普通に6個FETを載せればよかったなあ。
インホイールモータのドライブ基板で実験した時の動画です。
今年もあと10日です。
今年は基板を沢山起こしました。
やっぱ、海外の基板メーカーに直接注文出来るようになったのは嬉しい限りです。
2021/4/18 Discovery kit with STM32F469NI MCU
冬眠していて目覚めたらコロナの第4波になっていました。
組み込みのMCUでタッチパネルが簡単に使えないかと思い、STM32F469NIを購入しました。
主なスペック
・M32F469NIH6 microcontroller featuring 2 Mbytes of Flash memory and 324 Kbytes of RAM in BGA216 package
・4 inches 800x480 pixel TFT color LCD with MIPI DSI interface and capacitive touch screen
・MicroSD card connector
・4Mx32bit SDRAM
・128-Mbit Quad-SPI NOR Flash
TouchGFX っていうツールで画面の作成がサクサクみたい。
思う
一般人のワクチン接種は年内に行われるのでしょうか?
コロナで露呈した事が多くあります。
2021/5/28 うちゅうエレベータの模型
先日、地元の科学館にプラネタリウムを見に行きました。
半分ぐらいの展示物が感染防止のために「調整中」だったり、
撤退した企業があり、少し寂しくなっていました。
そんな中でも新しくなっている展示物がありました。
でも、決められた予算で作っているのか、少し残念でした。
自分だったら。。。と思い、対抗することにしました。
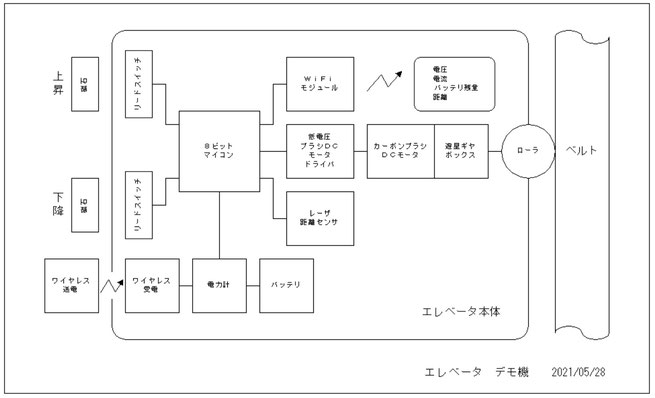
以前からワイヤレス給電に興味があったので実験用です。
今回使用する給電方式は共鳴型でないので、単なる効率の悪いトランスです。
4mまでのレーザ距離センサは購入しましたが、WiFiモジュールやモータドライバは転がっていたのを使います。
基板も起こしません。
思う
ゴールデンウィークの行いが悪かったので、田舎な地方都市でもコロナが蔓延しています。
フェーズが進んで子供達にも感染者が増えています。
C国の偉い人が言った「歩くウイルス」ではなく、「飛ぶウィルス」なので飛行機に乗って拡散が進みます。
まだまだ、お家時間を楽しみましょう。
プラネタリウムの解説のお姉さんは「天職」じゃないかと思うほど上手でした。
早くコロナが収束して、お客さんがいっぱいになるとイイね。
2021/6/3 うちゅうエレベータの模型 その2
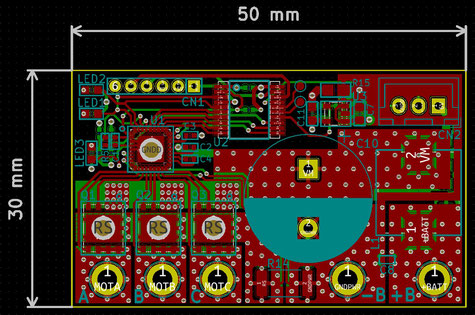
以前作った「低電圧モータドライブ基板」でプログラムを組んでいます。
ただ、プログラムサイズが大きくなったので、PICマイコンをPIC16F15323からPIC16F1765に変更しました。
この安い8ビットマイコンで制御をしています。
ROMサイズが2K→8Kへパワーアップして、データ用eepromも内臓されています。
同じTSSOPの14ピンなので互換性があります。
距離センサはVL53L1Xなのですが、このセンサは投受光の窓が大きいのが特徴です。
アレイになっているので、多点計測が可能です。
まあ、今回はこの機能は不要なので、プログラムがコンパクトになりました。
電力センサはINA226、WiFiモジュールはTWELITE 2525Aです。
TWELITE 2525Aはシリアル-WiFi変換のサンプルプログラムが無かったので、
MONO-STICKと合わせてTWELITE STAGEで作りました。
2525Aは余っていたので使ったのですが、加速度センサが付いていますが使っていません。
また、新規設計には非推奨品です。
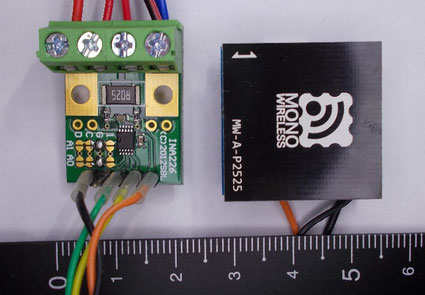
WiFi経由で送信したデータをパソコンに表示させました。
まだ、ケーブルに吊っていないので、距離が変化していません。
思う
昨夜、Aまり議員が日本の半導体産業について語っていました。
このままでは10年後には消滅してしまうかも。。。
残念です。
2021/6/3 うちゅうエレベータの模型 その3
タミヤの「楽しい工作シリーズ」で本体を作りました。
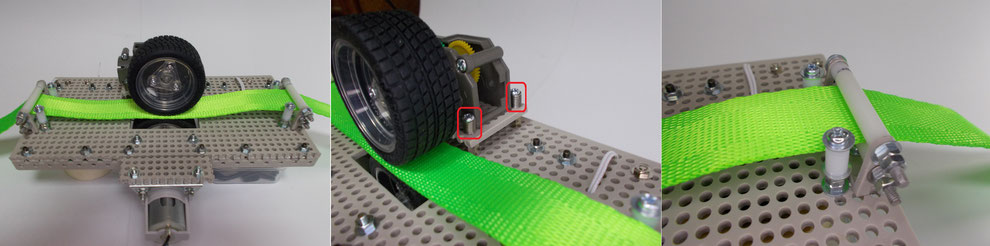
モータは1個です。
ベルトの通る裏面のタイヤのギヤボックスにはモータが有りません。
ケーブルが滑らないように、このギヤボックスをスプリングで押さえています。
また、ケーブルガイドも付けました。
思う
速いの、安いの、×美味い○上手い のって大切だと思う。
遅いの、高いの、しょぼいの にならないよう頑張ろう。
2021/6/9 うちゅうエレベータの模型 その4
屋外でベルトを張って試してみました。
んっが、全然登れませんでした。


タイヤの押さえつけが単純過ぎたようです。
もう少し工夫してみます。
最近
原木しいたけ栽培セットの「なるきのこDX」を購入しました。
食べ物には旬があって、この商品の販売時期は10月上旬~3月下旬です。
温度が高いと他の菌に負けてしまうのでしょうか?
20℃以下が適温なのに、27℃ぐらいあります。
無事に育つか心配です。
菌床タイプは食べきれないぐらいの収穫なので、原木にしました。